Community-built robots you can build, run, and own
 Other Robots
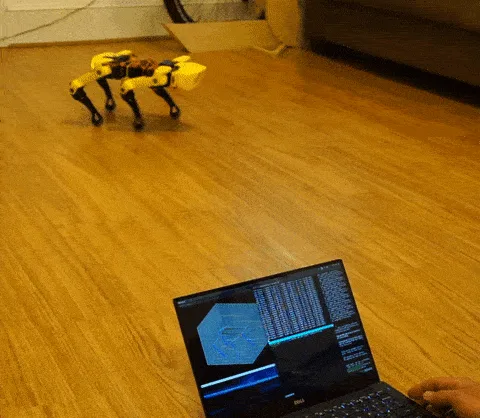
Other RobotsSpot Micro Quadruped — Jetson Nano (ROS Melodic)
Spot Micro Quadruped — Jetson Nano / ROS Melodic Port > Jetson-Nano-specific port of the SpotMicro design family. See also: SpotMicro (Pi) and SpotMicro ESP32 entries on orobot for other compute targets. A 12-servo, 4-legged 3D-printed open-source quadruped running ROS Melodic on an NVIDIA Jetson Nano. This fork () ports the original Raspberry Pi 3B + ROS Kinetic stack onto the Jetson Nano with ROS Melodic, unlocking the GPU for on-board SLAM, perception, and future learned-policy work. The robot supports sit, stand, body angle, and walk control via two configurable gaits (8-phase stable gait by default; faster trot gait optional). Body-mounted RPLidar A1 enables real-time SLAM and 2D mapping. State is published over tf2 with open-loop calculated odometry. Hardware Compute: NVIDIA Jetson Nano (this port). Original target was Raspberry Pi 3B. Frame: Thingiverse Spot Micro (KDY0523) — thing:3445283 Servos: 12× PDI-HV5523MG (or cls6336hv — print files compatible) Servo control: PCA9685, i2c Power: 2S 4000 mAh LiPo direct to servo board; HKU5 5V/5A UBEC for Jetson + peripherals Sensing: RPLidar A1 (body-mounted) Optional: 16×2 i2c LCD panel for state readout Software stack OS: Ubuntu 18.04 (for ROS Melodic on Jetson Nano). Original used Ubuntu 16.04 + ROS Kinetic. Framework: ROS Melodic catkin workspace Languages: C++ (motion control, kinematics) + Python (keyboard command, plot) Key packages: , , (URDF), , , Build flow 1. Flash Jetson Nano with Ubuntu 18.04 + ROS Melodic. Add a 1 GB SWAP partition (catkin will OOM without it). 2. Create a catkin workspace, clone this repo into , run . 3. . 4. . 5. Calibrate all 12 servos using the spreadsheet + workflow before powering the legs. 6. on the Jetson; from a remote machine. Family cross-reference This is one of three SpotMicro variants on orobot — pick the compute target that matches your build: SpotMicro (Raspberry Pi) — original , Pi 3B + ROS Kinetic. SpotMicro ESP32 — , microcontroller-only port without ROS. SpotMicro Jetson Nano (this entry) — Jetson Nano + ROS Melodic, GPU-accelerated SLAM. Source Repo: https://github.com/0x49b/spotMicro-ROS-Melodic-Jetson-Nano Commit: 8c027c8a357dceace856d586022954205bc247ed License: MIT Upstream: (this is a Jetson Nano fork)
from $480🛠 BoM Other Robots
Other RobotsStringman
Room scale cable driven parallel robot
from $210🛠 BoM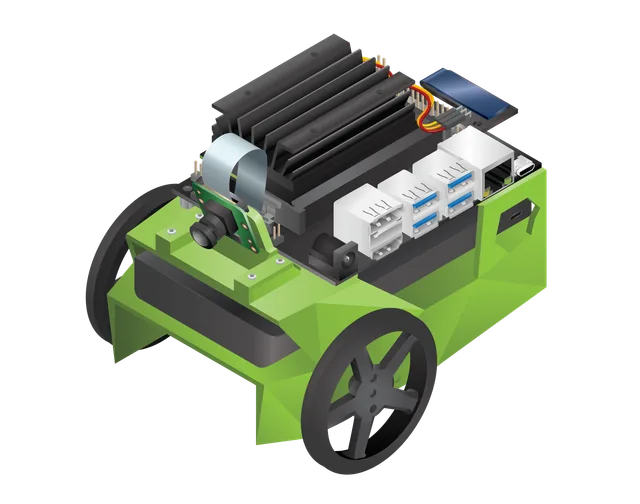 Other Robots
Other RobotsJetBot — NVIDIA Jetson AI Rover
JetBot — NVIDIA Jetson AI Rover JetBot is an open-source AI robot platform built on the NVIDIA Jetson Nano. It combines a small two-wheeled chassis with a Jetson Nano compute module, a wide-angle camera, and the full NVIDIA JetPack SDK — enabling object following, collision avoidance, and road-following using convolutional neural networks trained with Jupyter notebooks. JetBot is NVIDIA's official introductory robotics platform, making it one of the most well-documented and widely-built AI robots for beginners and educators. Hardware NVIDIA Jetson Nano Developer Kit (4GB or 2GB) Compatible chassis kit (e.g. SparkFun JetBot Kit or Waveshare JetBot Kit) Wide-angle USB or CSI camera Adafruit Motor FeatherWing or equivalent LiPo battery pack microSD card (32 GB+) What It Can Do Object following — tracks a sport ball or colored object using a CNN trained in-browser with Jupyter Collision avoidance — learns to navigate around obstacles via a head-mounted classifier Road following — stays on a track by regressing a steering angle from a front camera Teleoperation — browser gamepad control via the interactive widget interface Source Repo: https://github.com/NVIDIA-AI-IOT/jetbot License: MIT Docs: https://jetbot.org
from $250🛠 BoMBrowse by type