Kame32
 B
B✓ Confirmed fresh Jun 1, 2026
Sign up to InstallAbout this program
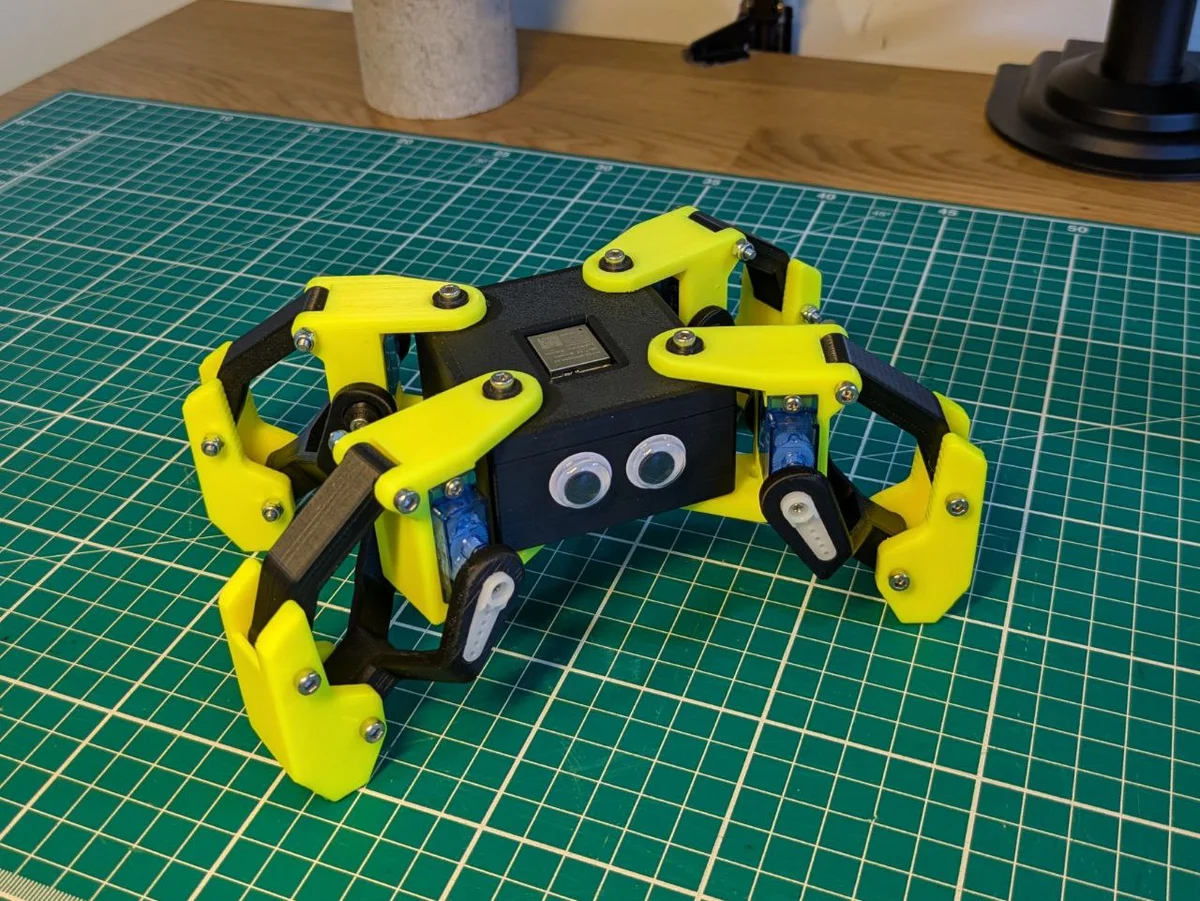
Kame32 is an open-source quadruped walking robot by JavierIH. Built around an ESP32 and 8 servo motors, it walks, runs, dances, and performs a rich library of quadruped gaits — all controlled wirelessly via a built-in web-based gamepad over Wi-Fi.
All structural parts are 3D-printable. A custom PCB (KiCAD gerbers included) centralizes servo wiring. Choose MG90S (higher torque) or SG90 servos — brackets for both variants are included.
Specifications
| Property | Value |
|---|---|
| Motors | 8 servos (MG90S or SG90) |
| DOF | 8 (2 per leg) |
| Controller | ESP32 Dev Kit |
| Control | Web gamepad via Wi-Fi |
| PCB | Custom KiCAD design (gerbers included) |
| CAD | FreeCAD source file |
| Build time | 1–2 weekends |
| Skill level | Intermediate |
Gaits
Walk · Backward · Run · Omni Walk · Turn Left · Turn Right · Moonwalk · Dance · Up/Down · Push Up · Hello · Jump · Home
All gaits use the Octosnake oscillator library — sinusoidal servo control with per-axis phase offsets.
Hardware
ESP32 drives 8 PWM servos at 50 Hz / 16-bit resolution on GPIO 5, 18, 19, 21, 25, 26, 32, 33. Per-servo calibration offsets stored in ESP32 NVS.
Firmware
PlatformIO / Arduino. Build environments: calibration (tune offsets) and gamepad (web UI controller).
Attribution
Creator: JavierIH Source: github.com/javierih/kame32 License: CC BY-SA 4.0 (hardware) - GPL-3.0 (code)
Build Guide
Source repository with CAD, firmware, and assembly files: github.com/JavierIH/Kame32
Build Guide
Source repository with CAD, firmware, and assembly files: github.com/JavierIH/Kame32
🖨 Print Files (13)
body-box.stl
body-cover.stl
bracket-left-mg90s.stl
bracket-right-mg90s.stl
bushing.stl
foot.stl
Required Hardware
| Qty | Part | Notes |
|---|---|---|
| 8 | SG90 (180°) micro servo | Or MG90s metal-gear for higher torque |
| 1 | ESP32 30-pin type-C dev board | — |
| 1 | LiPo 2S 350mAh battery | — |
| 1 | USB LiPo 2S 1A charger | — |
| 1 | Protoboard 7×9 cm | For shield/PCB |
| 2 | DC-DC buck converter 5V 3A | Step-down from battery |
| 1 | Power switch SS12D10 | — |
| 12 | Screw M3×30 | For leg assembly |
| 10 | Screw M3×8 | For brackets |
| 10 | Nut M3 | — |
| 12 | Nut M3 nyloc | — |
| 1 | PCB (custom KiCAD design) | Optional, or use protoboard |
| 1 | PLA filament (≈100g) | For 3D-printed parts |