




 B
BAbout this program
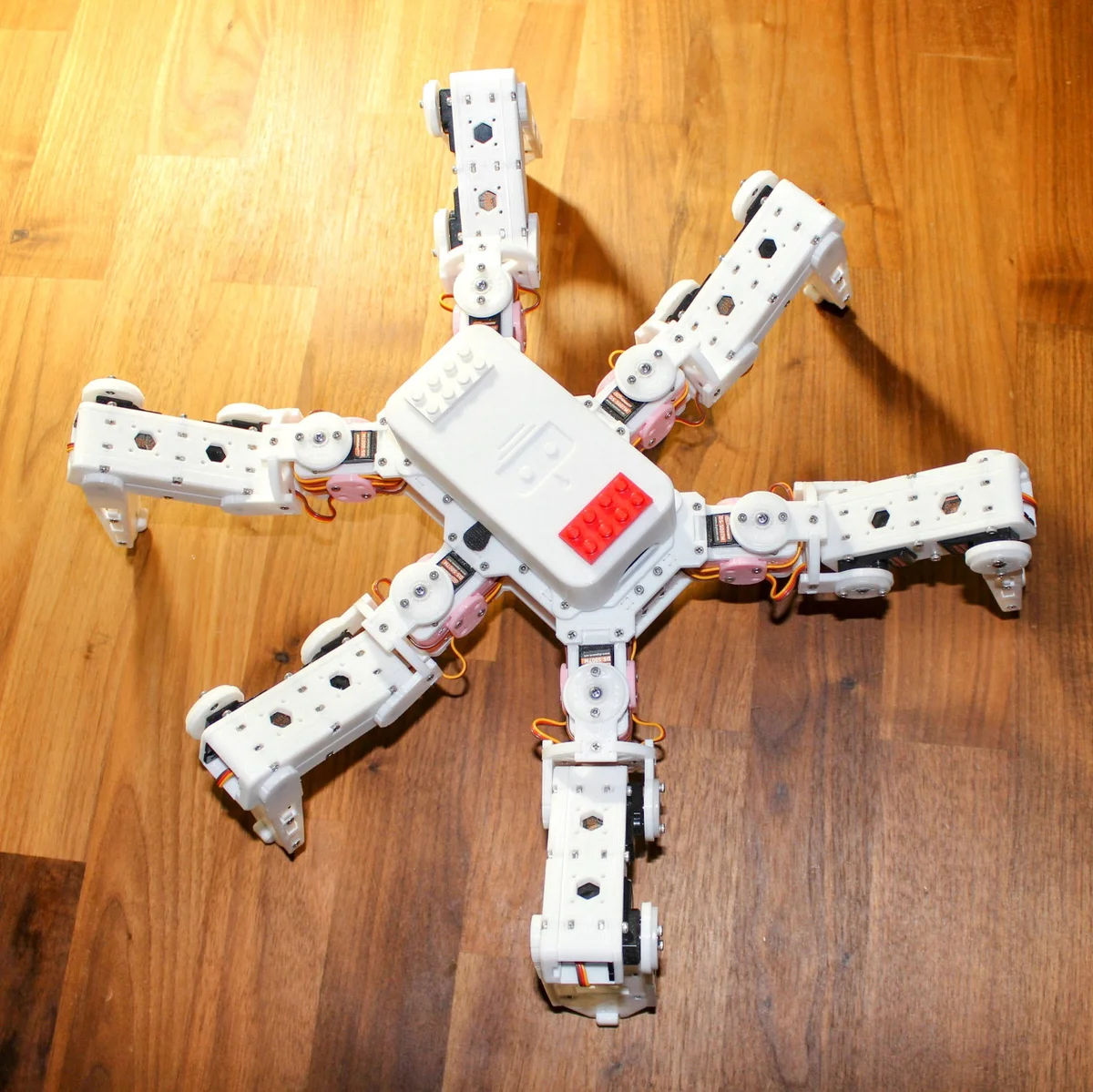
Hexapod — 3D Printed Six-Legged Walking Robot
A fully 3D-printed hexapod robot with 18 servo motors (three per leg) providing lifelike, agile locomotion. Designed by rookidroid.com, this project uses either an ESP32 or Raspberry Pi Pico W/2W controller board with built-in WiFi for wireless remote control. The firmware supports over-the-air (OTA) updates so you can iterate on motion patterns without touching the hardware.
Hexapod v2 is the recommended build. The original v1 used MG90S servos which are prone to failure; v2 upgrades to stronger 21G DS Power/Miuzei servos and is significantly more reliable.
Specifications
| Property | Value |
|---|---|
| Legs | 6 |
| Servos | 18 x 21G (3 per leg: hip, knee, ankle) |
| Controller | ESP32 or Raspberry Pi Pico W/2W |
| Communication | WiFi (UDP port 1234) + OTA updates |
| Power | 2 x 18650 Li-ion cells |
| Print time | ~40-60 hours total (no supports needed) |
| Skill level | Intermediate |
Motion Modes
The ESP32 firmware implements a pre-computed look-up-table gait system with 18 motion modes including: directional walking at 0, 45, 90, 135 degrees (left and right variants), 180 degrees; fast forward and backward; turn left and right; climb forward and backward; body rotations on X, Y, Z axes; and a twist mode.
Bill of Materials
| Item | Qty | Notes |
|---|---|---|
| 21G servo (DS Power or Miuzei) | 18 | Main actuators |
| Hexapod controller board (ESP32 or Pico version) | 1 | From rookidroid.com |
| 18650 Li-ion battery | 2 | |
| 18650 battery holder | 1 | |
| Rocker switch | 1 | |
| M2 x 6mm screws | 36 | |
| M2 x 10mm screws | 198 | |
| M2 nuts | 234 | |
| M4 x 6mm pins (304 steel) | 18 | |
| MR74-2RS bearings (4x7x2.5mm) | 18 | Leg joints |
3D-Printed Parts
All parts print without supports. The full set covers: body (9 unique parts), joints (3 types, 6 sets), legs (3 types, 6 sets), feet (4 types, 6 sets), and a cable-holder accessory — 20 unique STL files, all included here.
Attribution
Creator: rookidroid.com Source: https://github.com/rookidroid/hexapod License: GNU GPL v3
🖨 Print Files (20)
body_base.STL
body_side.STL
body_front_back.STL
body_top.STL
body_top_cover.STL
body_battery.STL
Required Hardware
| Qty | Part | Notes |
|---|---|---|
| 18 | 21G servo (DS Power or Miuzei) | 3 per leg — v2 spec; do not use MG90S |
| 1 | Hexapod controller board (ESP32) | From rookidroid.com — see affiliate links |
| 2 | 18650 Li-ion battery | |
| 1 | 18650 battery holder | |
| 1 | Rocker switch | |
| 1 | M2 screw/nut assortment | |
| 18 | MR74-2RS bearings (4x7x2.5mm) | Leg joints |